 Las circunstancias con las
que nos encontramos hoy en el campo de los
Las circunstancias con las
que nos encontramos hoy en el campo de los
microcontroladores tienen
sus raíces en el desarrollo de la tecnología de los
Este
desarrollo ha hecho posible contener cientos de miles de transistores en un
solo chip. Ése era uno de los requisitos previos para la producción de los
microprocesadores, y las primeras computadoras eran hechas agregando
periféricos externos como la memoria, timers etc. lo que aumentaba el volumen
de los circuitos integrados. Estos circuitos integrados contenían procesador y
periféricos.
 Así es cómo se desarrollo el primer chip que contenía una
microcomputadora, o lo que después se llegaría a conocer como un
microcontrolador.
Así es cómo se desarrollo el primer chip que contenía una
microcomputadora, o lo que después se llegaría a conocer como un
microcontrolador.
En el año 1969, un equipo
de ingenieros japoneses de la compañía BUSICOM llegó a Estados
Unidos con una idea, ellos deseaban usar para su proyectos pocos circuitos
integrados de los que se usaban en las calculadoras. La proposición se hizo a
INTEL, y Marcian Hoff era el responsable del proyecto. Ya que él era quien tenía
experiencia trabajando con una computadora (PC) PDP8, se le ocurrió pensar en
una solución fundamentalmente diferente en lugar de la construcción sugerida.
Esta solución presumía que la función del circuito integrado se determinaría
por un programa almacenado en él. Eso significaba que la configuración sería
más simple, pero que requeriría mucho más memoria de lo que requería el
proyecto que propusieron los ingenieros japoneses.


Las circunstancias con
las que nos encontramos hoy en el campo de los microcontroladores tienen sus
raíces en el desarrollo de la tecnología de los circuitos integrados. Este
desarrollo ha hecho posible contener cientos de miles de transistores en un
solo chip. Ése era uno de los requisitos previos para la producción de los
microprocesadores, y las primeras computadoras eran hechas agregando
periféricos externos como la memoria, timers etc. lo que aumentaba el volumen
de los circuitos integrados. Estos circuitos integrados contenían procesador y
periféricos. Así es cómo se desarrollo el primer chip que contenía una
microcomputadora, o lo que después se llegaría a conocer como un
microcontrolador.
Un microcontrolador es un circuito integrado que
contiene toda la estructura (arquitectura) de un microcomputador, o sea CPU,
RAM, ROM y circuitos de entrada y salida. Los resultados de tipo práctico, que
pueden lograrse a partir de estos elementos, son sorprendentes.
Algunos microcontroladores más especializados
poseen además convertidores análogos digital, temporizadores, contadores y un
sistema para permitir la comunicación en serie y en paralelo
Se pueden crear muchas aplicaciones con los
microcontroladores. Estas aplicaciones de los microcontroladores son ilimitadas
(el límite es la imaginación) entre ellas podemos mencionar: sistemas de
alarmas, juego de luces, paneles publicitarios, etc. Controles automáticos para
la Industria en general. Entre ellos control de motores DC/AC y motores de paso
a paso, control de máquinas, control de temperatura, control de tiempo,
adquisición de datos mediante sensores, etc.
Al principio, los controladores
estaban formados exclusivamente por componentes discretos. Más tarde, se emplearon
procesadores rodeados de memorias, circuitos de E/S,… sobre una placa de
circuito impreso (PCB).
Actualmente,
los controladores integran todos los dispositivos antes mencionados en un
pequeño chip. Esto es lo que hoy conocemos con el nombre de microcontrolador.
El microcontrolador es uno de los logros más sobresalientes
del siglo XX. Hace un cuarto de siglo tal afirmación habría parecido absurda.
Pero cada año, el microcontrolador se acerca más al centro de nuestras vidas,
forjándose un sitio en el núcleo de una máquina tras otra. Su presencia ha
comenzado a cambiar la forma en que percibimos el mundo e incluso a nosotros
mismos. Cada vez se hace más difícil pasar por alto el microcontrolador como
otro simple producto en una larga línea de innovaciones tecnológicas.
Ninguna otra invención en la historia se ha diseminado tan aprisa por
todo el mundo o ha tocado tan profundamente tantos aspectos de la existencia
humana. Hoy existen casi 15,000 millones de microchips de alguna clase en uso.



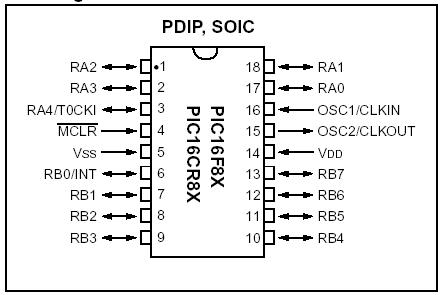
 Estos puertos pueden ser programados
como de entrada o de salida.
Estos puertos pueden ser programados
como de entrada o de salida.
 Las circunstancias con las
que nos encontramos hoy en el campo de los
Las circunstancias con las
que nos encontramos hoy en el campo de los








